BeerCat
Landlord.
- Joined
- May 6, 2015
- Messages
- 5,292
- Reaction score
- 1,694
Does anyone have any info on manually tuning a Inkbird PID? Mine was working perfectly but i was exploring the setting and accidentally "autorun" and now its all over the place. Obviously i should of noted the settings before i touched it. Retuned repeatedly and still the same. Does anyone have any advice as best to perform autorun ? I have tried it full of grain at 65c but it jumps over a lot which is not ideal and even after it finishes it still has large swings. Before it was keeping it to within 0.2c. I have heard people say they tuned theirs with spent grain. The fact that it does not turn off after it reaches target temps shows the setting are way off. I have looked into manual tuning but i really have no idea what the parameters mean.
For instance i know they are proportional, integral and derivative but i have no idea what that really means or how they affect each other. I was hoping i could find a simple calc or clear online explanation but its all over my head. I have read the manual multiple times but that has not helped either. I have looked at articles like this but really hurts my head. Help please @fil :)
For instance i know they are proportional, integral and derivative but i have no idea what that really means or how they affect each other. I was hoping i could find a simple calc or clear online explanation but its all over my head. I have read the manual multiple times but that has not helped either. I have looked at articles like this but really hurts my head. Help please @fil :)
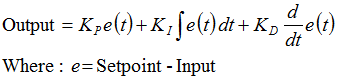
") and All of those programming heros ran with the default 20, 5, 1. settings
and All of those programming heros ran with the default 20, 5, 1. settings 







![BREWING THERMOMETER STICKERS ACCURATELY MONITOR FERMENTING BEER & WINE LIQUID TEMPERATURES 5PCS HOME BREW SPIRITS WINE LCD ADHESIVE [US]](https://m.media-amazon.com/images/I/311DDjo2X3L._SL500_.jpg)